Vega MT-5
Vega MT-5 Vega MT X Int
Vega MT X Int Vega MT X Ext
Vega MT X Ext Vega MT X LTE
Vega MT X LTE Vega MT-21
Vega MT-21 Vega MT-25
Vega MT-25 Vega M100
Vega M100 Vega M110
Vega M110 Vega M50
Vega M50 Vega M410
Vega M410 Vega MX600L
Vega MX600L Vega MX500
Vega MX500 Vega MX810
Vega MX810 Vega RK-2.4
Vega RK-2.4 Vega SM-1
Vega SM-1 Buttons
Buttons Indicators
Indicators Vega ST-1
Vega ST-1 Vega SD-1
Vega SD-1 GLONASS/GPS Antennas
GLONASS/GPS Antennas GSM Antennas
GSM Antennas Connectors with Wires
Connectors with Wires Vega K-232
Vega K-232 Vega SA-1
Vega SA-1 Vega RP-1
Vega RP-1 Destination Display Boards
Destination Display Boards Vega BLE module
Vega BLE module Vega MT-5
Vega MT-5 ESCD
ESCD  Vega MT X LTE BT
Vega MT X LTE BT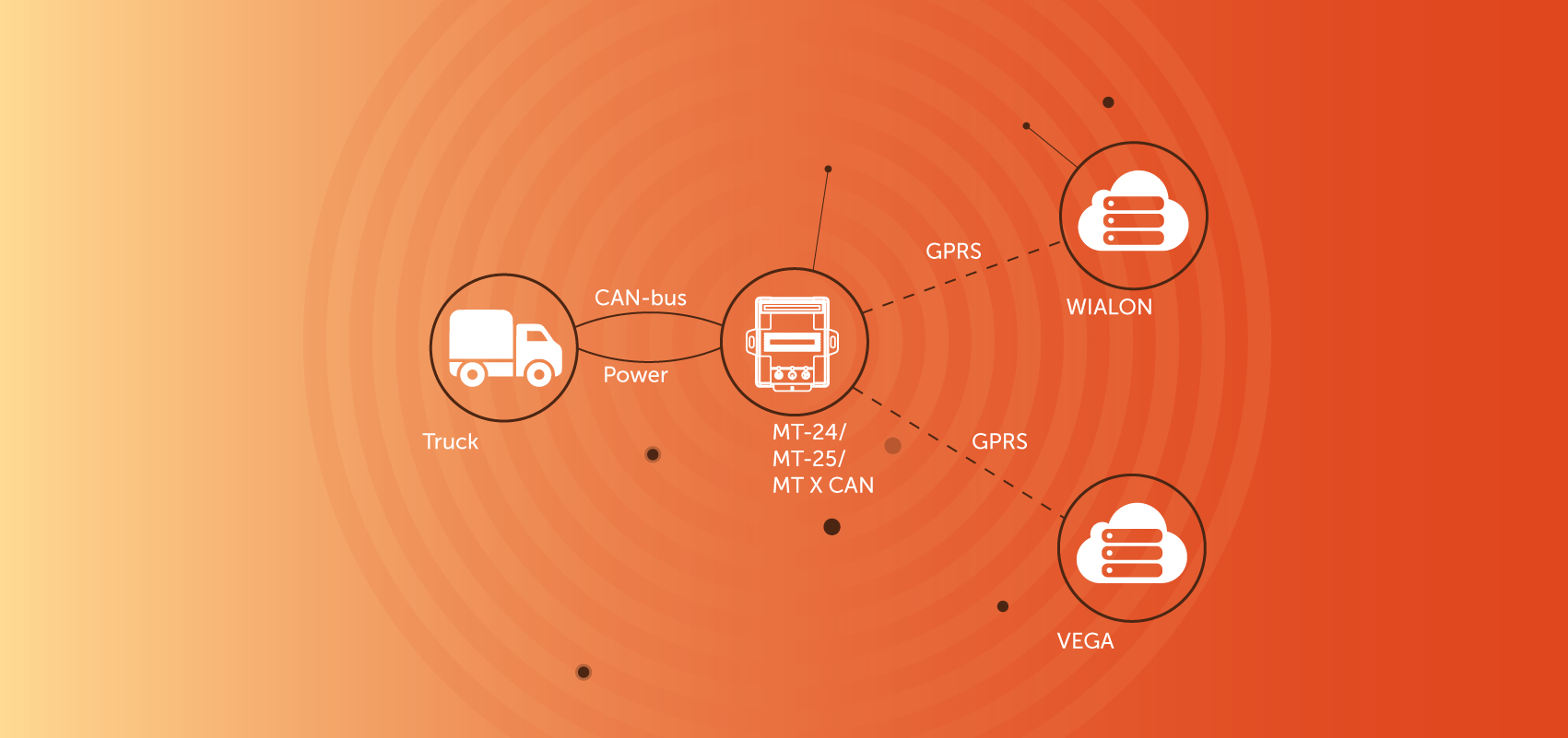
- Connect the truck's CAN-bus to the GNSS Tracker;
- Download ready-made CAN sensor (standard J1939) settings from our VEGA server;
- Connect power from the on-board network to the GNSS Tracker;
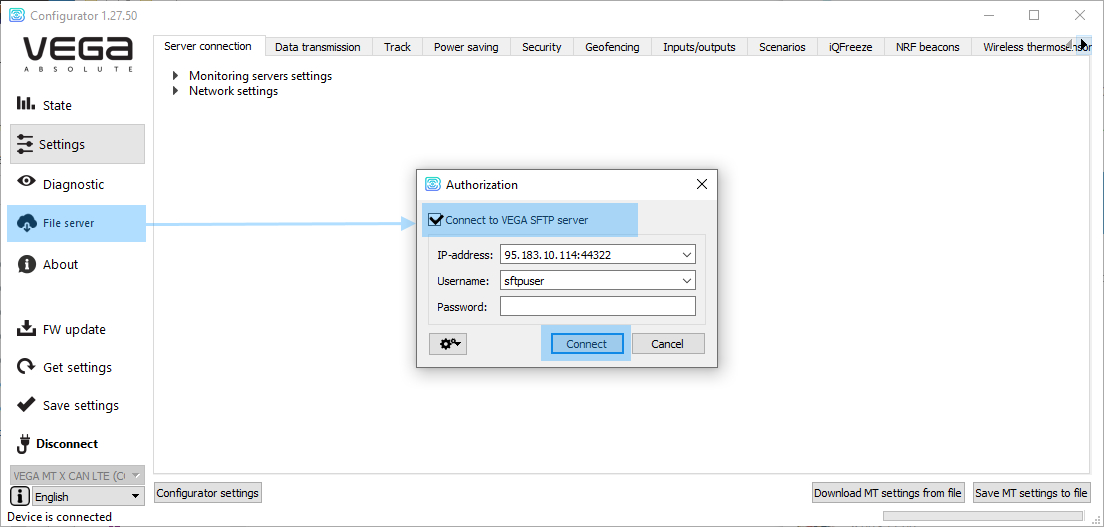
- Configure the device and the cloud monitoring service (WIALON or any other, including your own);
- Now you can control the truck's location and view the saved tracks of movements, as well as save and at any time view the truck's parameters*: mileage, fuel level, instant fuel consumption, total engine operating time, speed, engine speed, coolant temperature, seat belt fastened, status of indicators on the dashboard, axle load etc.
*The list of available parameters depends on the specific truck model.
The configuration of CAN sensors for a specific vehicle model can be downloaded from the VEGA SFTP server. Downloading and uploading of the configuration of CAN sensors is available directly to the GNSS Tracker.